SÁVIO SOUZA FERREIRA
Sistema de Iluminação de Led Via Bateria
Compartilhe esse conteúdo
Conheça nossos templates acadêmicos
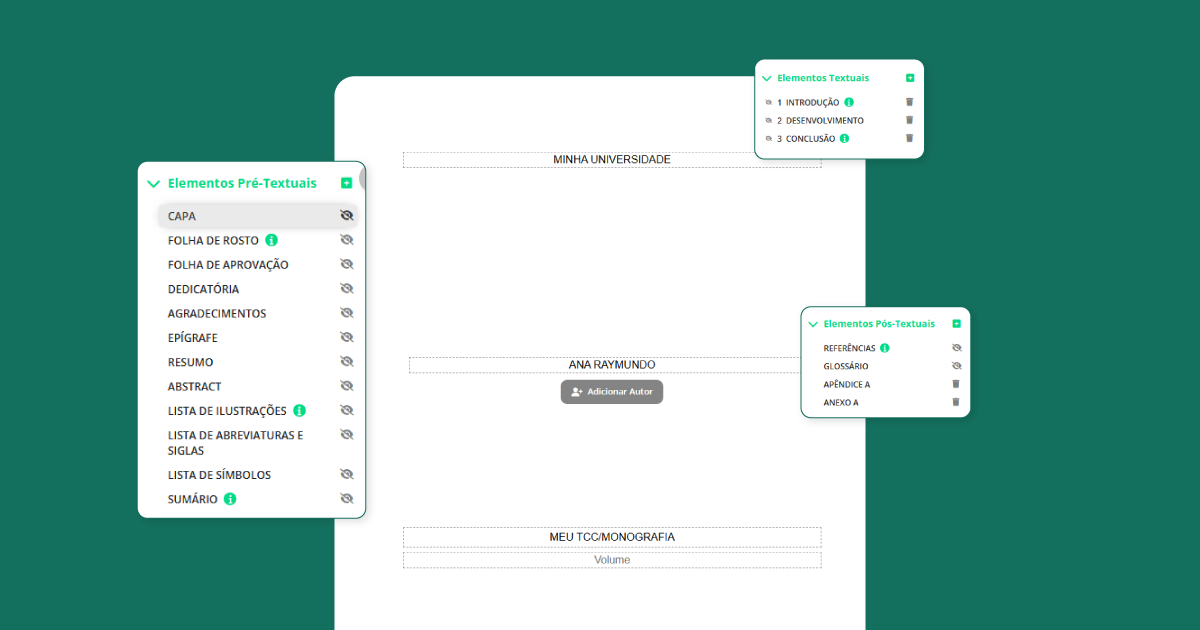
Trabalho de conclusão de curso - TCC
Mettzer
Ver template
Monografia
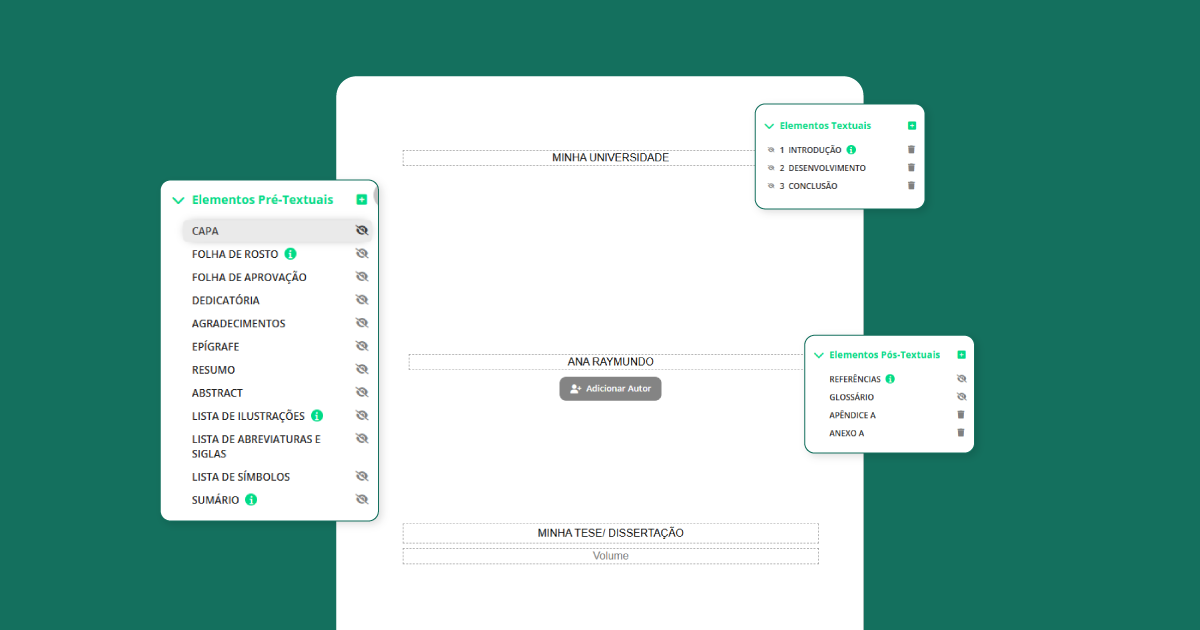
Tese
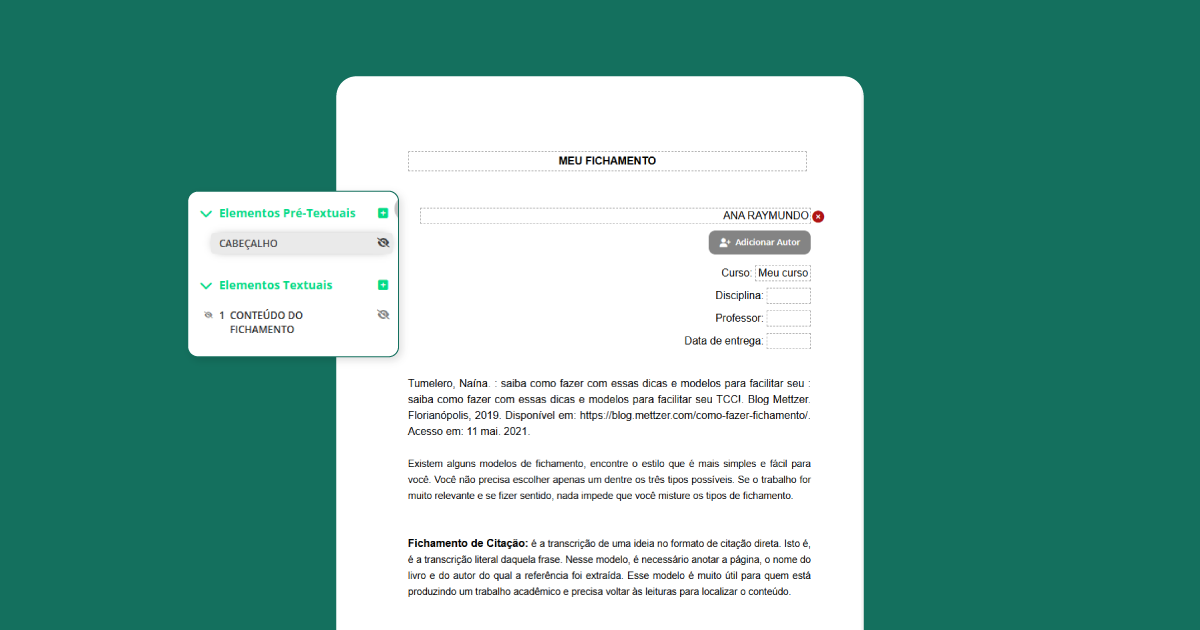
Fichamento
Resumo
Projeto de pesquisa
Paper
Resenha crítica
Dissertação
Artigo
PIM
PIM UNIP
Relatório de estágio
Capa de trabalho